# EtherCAT
[](https://hex.pm/packages/ethercat)
[](https://hexdocs.pm/ethercat)
[](https://github.com/sid2baker/ethercat/blob/main/LICENSE)
[](https://www.youtube.com/watch?v=huwbTsmTPHc)
Pure-Elixir EtherCAT master built on OTP.
- No NIF.
- No kernel module.
- Nerves-first, runs on standard Linux too.
- Best for discrete I/O, Beckhoff terminal stacks, diagnostics, and 1 ms to 10 ms cyclic loops.
- Not the right fit for sub-millisecond hard real-time control.
The entry idea is simple: the **master owns the session lifecycle**, **domains own cyclic LRW exchange**, **slaves own ESM and slave-local configuration**, and **DC owns clock discipline**. Critical domain/DC runtime faults move the public state to `:recovering`; slave-local faults are tracked separately so healthy cyclic parts can stay up.
## Installation
```elixir
def deps do
[{:ethercat, "~> 0.2.0"}]
end
```
Raw Ethernet socket access requires `CAP_NET_RAW` or root:
```bash
sudo setcap cap_net_raw+ep _build/dev/lib/ethercat/priv/raw_socket
```
## Quick Start
### Discover a ring
```elixir
EtherCAT.start(interface: "eth0")
:ok = EtherCAT.await_running()
EtherCAT.state()
#=> :preop_ready
EtherCAT.slaves()
#=> [
#=> %{name: :slave_0, station: 0x1000, server: {:via, Registry, ...}, pid: #PID<...>},
#=> ...
#=> ]
EtherCAT.stop()
```
If you start without explicit slave configs, EtherCAT still scans the ring, names each
station, and brings every slave to `:preop`. That is the right entry point for
exploration, diagnostics, and dynamic configuration.
### Run cyclic PDO I/O
```elixir
defmodule MyApp.EL1809 do
@behaviour EtherCAT.Slave.Driver
def process_data_model(_), do: [ch1: 0x1A00]
def encode_signal(_, _, _), do: <<>>
def decode_signal(_, _, <<_::7, bit::1>>), do: bit
def decode_signal(_, _, _), do: 0
end
EtherCAT.start(
interface: "eth0",
domains: [%EtherCAT.Domain.Config{id: :io, cycle_time_us: 1_000}],
slaves: [
%EtherCAT.Slave.Config{name: :coupler},
%EtherCAT.Slave.Config{
name: :inputs,
driver: MyApp.EL1809,
process_data: {:all, :io},
target_state: :op
}
]
)
:ok = EtherCAT.await_operational()
EtherCAT.subscribe(:inputs, :ch1)
{:ok, {bit, updated_at_us}} = EtherCAT.read_input(:inputs, :ch1)
```
For PREOP-first workflows, configure discovered slaves dynamically:
```elixir
EtherCAT.start(
interface: "eth0",
domains: [%EtherCAT.Domain.Config{id: :main, cycle_time_us: 1_000}]
)
:ok = EtherCAT.await_running()
:ok =
EtherCAT.configure_slave(
:slave_1,
driver: MyApp.EL1809,
process_data: {:all, :main},
target_state: :op
)
:ok = EtherCAT.activate()
:ok = EtherCAT.await_operational()
```
## Mental Model
- The master owns startup, activation-blocked startup, and runtime recovery decisions.
- The bus is the single serialization point for all frames.
- Domains own logical PDO images and cyclic LRW exchange.
- Slaves own AL transitions, SII/mailbox/PDO setup, and signal decode/encode.
- DC owns distributed-clock initialization, lock monitoring, and runtime maintenance.
If you understand those five roles, the rest of the API is predictable.
## Lifecycle
Public startup and runtime health are exposed through `EtherCAT.state/0`:
- `:idle`
- `:discovering`
- `:awaiting_preop`
- `:preop_ready`
- `:operational`
- `:activation_blocked`
- `:recovering`
`await_running/1` waits for a usable session. `await_operational/1` waits for cyclic OP. Inspect `EtherCAT.slaves/0` for per-slave fault state.
For detailed state diagrams and sequencing, see the moduledocs:
- `EtherCAT.Master` — startup, activation, and recovery orchestration
- `EtherCAT.Slave` — ESM transitions and AL control
- `EtherCAT.Domain` — cyclic LRW exchange states
- `EtherCAT.DC` — distributed-clock lock tracking
## Failure Model
- A slave disconnect does not automatically mean full-session teardown.
- Critical domain or DC faults move the master to `:recovering`.
- Slave-local faults stay attached to the affected slave and are visible through `EtherCAT.slaves/0`.
- Healthy domains can keep cycling if the fault is localized and the transport is still usable.
- Total bus loss can stop domains after the configured miss threshold; recovery can restart them.
- Slave reconnect is PREOP-first: the slave rebuilds its local state, then the master decides when to return it to OP.
The maintained end-to-end hardware walkthrough is the `examples/fault_tolerance.exs`
script in the repo.
## Where To Start
### Fastest path
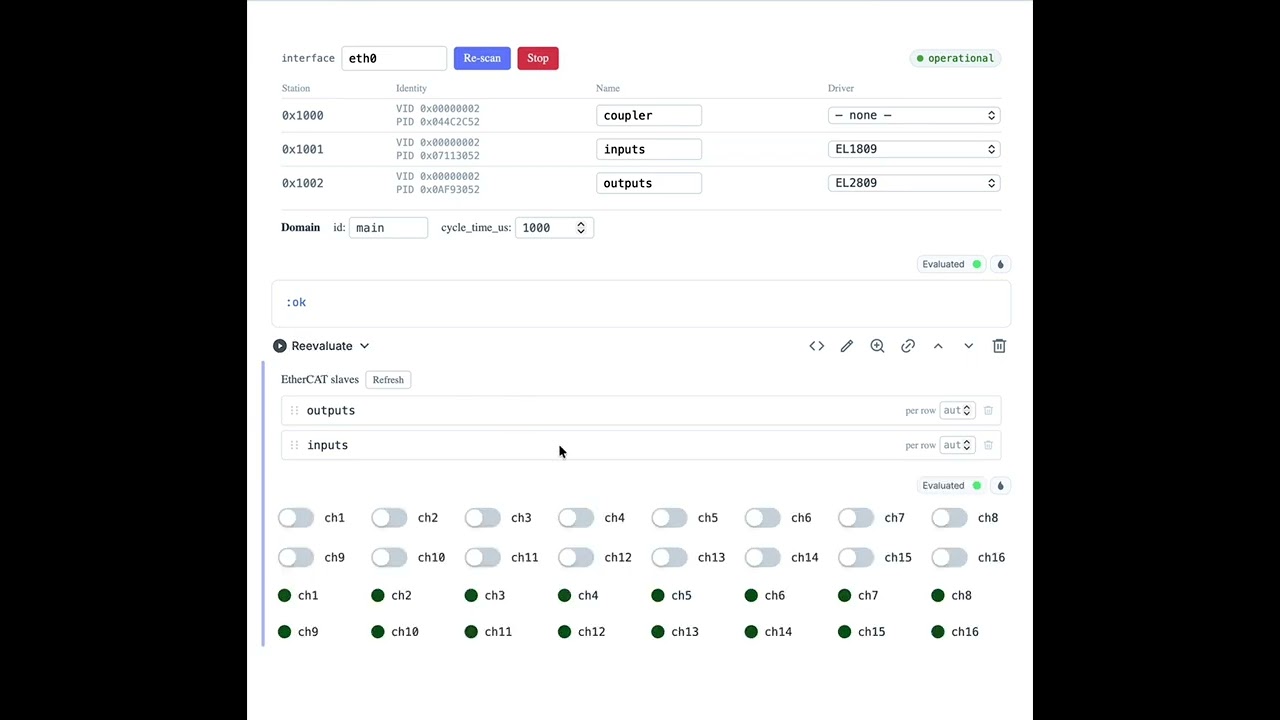
[`kino_ethercat`](https://github.com/sid2baker/kino_ethercat) gives you an
interactive UI for ring discovery, I/O control, and diagnostics.
### Maintained hardware examples
The repo ships maintained hardware scripts under `examples/`.
Recommended first stops:
- `examples/scan.exs`
- `examples/diag.exs`
- `examples/wiring_map.exs`
- `examples/dc_sync.exs`
- `examples/fault_tolerance.exs`
### Deeper architecture
- [`ARCHITECTURE.md`](https://github.com/sid2baker/ethercat/blob/main/ARCHITECTURE.md) for subsystem boundaries and data flow
- [`hexdocs.pm/ethercat`](https://hexdocs.pm/ethercat) for the API reference
